






























✔ worldwide delivery
✔ Refund for lost or damaged packages

✔ We offer a variety of secure payment methods, including debit/credit cards, PayPal, and bank transfers.
✔ Every transaction is protected
✔ 100% Authentic, Official Warranty
✔ Returns within 15 days – quality issues only
-33.svg?w=256&h=256)
✔ 24-hour response
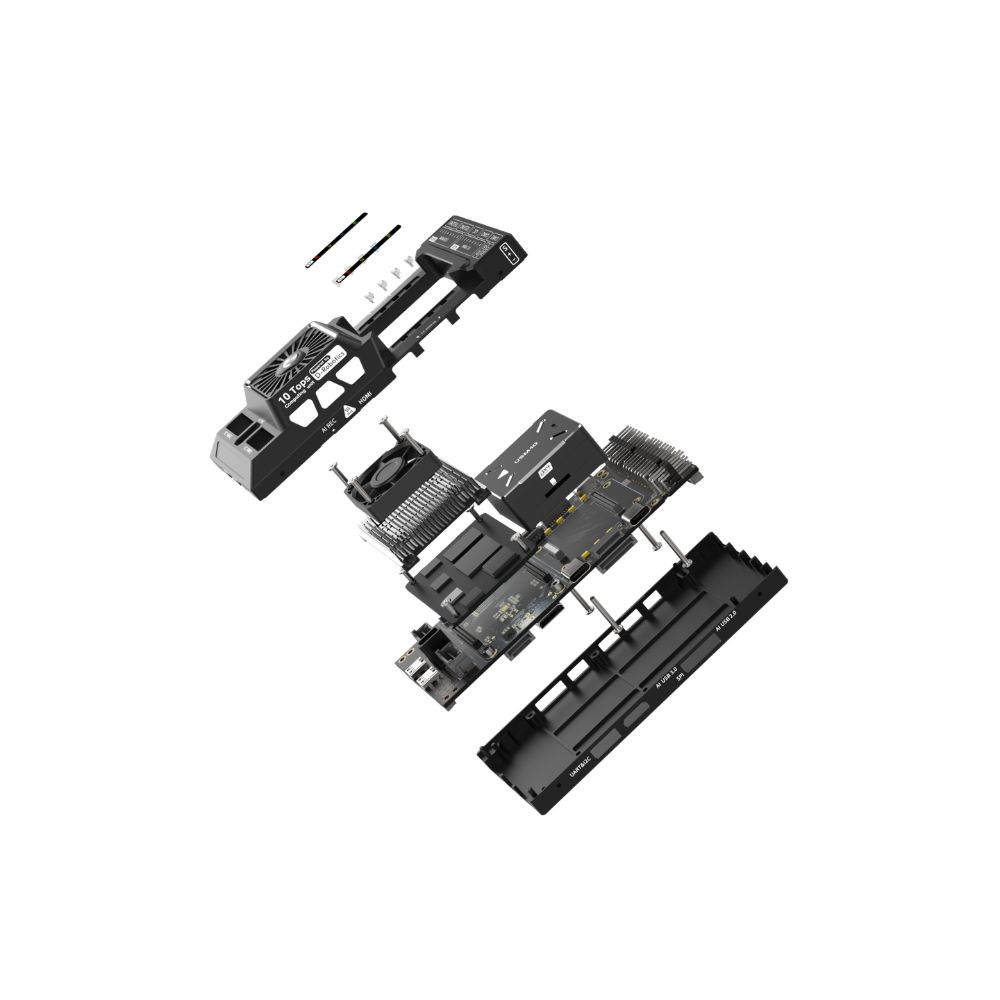
The USX52 Compute Flight Controller combines the mature Pixhawk 6X flight controller architecture with the D-Robotics X5 AI chip, integrating stable flight control with edge intelligence in an onboard flight control platform. Based on PX4/ArduPilot firmware, it achieves highly reliable flight management. With the X5 chip's BPU AI computing power of 10 TOPS, it can run various neural network algorithms locally in real-time, including image recognition, object detection, semantic segmentation, human detection, object counting, spatial perception, reinforcement learning, and more. The CPU general computing power reaches 21.6 DMIPS/MHz, which can run VIO visual odometry, LIO LiDAR odometry, SLAM mapping and localization, Navigation2 navigation, path planning, and other algorithms without relying on cloud computing, completing the perception, planning, and action loop independently. The module is compatible with RTK, UWB, optical flow, ADS-B and other peripherals, supporting multi-sensor data fusion and intelligent mission planning, balancing flight safety, positioning accuracy, and operational autonomy. Widely applicable to industrial inspection, research and development, autonomous operations, and other drone scenarios with dual demands for flight stability and edge intelligence.
Product Advantages
1. Embedded AI Computing Power: Flight Controller Features a Local "Intelligent Brain"
Integrates a 10 TOPS AI chip (INT8), enabling the local execution of models for object detection, recognition, tracking, segmentation, and more. Eliminates the reliance on ground stations or cloud servers, thereby reducing communication latency and enhancing flight autonomy.
2. Integrated Architecture: Flight Control + AI Fusion
Employs a dual-system architecture: the flight controller runs PX4/ArduPilot, while the AI computing platform runs Ubuntu + ROS2. The flight control and AI systems can operate independently yet collaborate seamlessly; edge perception and flight control are tightly coupled, ensuring a balance between efficiency and stability.
3. Domestically Developed & Fully Controllable: The Preferred Choice for Trusted Computing Initiatives
Powered by the domestically produced D-Robotics X5 AI chip, the system meets the stringent requirements for localization and sovereign control demanded by sectors such as defense, energy, government, and scientific research. Future updates will support adaptation to domestic operating systems (e.g., Galaxy Kylin, NeoKylin).
4. Rich Interfaces & Robust Sensor Compatibility
Supports a wide array of interfaces, including MIPI cameras, USB 3.0 cameras, serial-port radars, CAN bus, PWM, and Ethernet. It is extensible to accommodate various sensors—such as vision systems, LiDAR, thermal imagers, and millimeter-wave radars—enabling a single unit to adapt to multiple aircraft configurations (multirotor, VTOL, fixed-wing, etc.).
5. Suitable for Diverse Complex Environments and Missions
Equipped with edge-based intelligent analysis capabilities, making it ideal for high-risk, long-range, low-bandwidth, and low-latency scenarios. Applications include power line inspection, forest fire monitoring, post-disaster search and rescue, and smart security surveillance. Features an industrial-grade design capable of operating in temperatures ranging from -20°C to 65°C, with strong resistance to electromagnetic interference.
6. Fully Open Stack: Ideal for R&D, Education, and Custom Development
Provides a comprehensive SDK, APIs, toolchains, and sample code. Supports secondary development, custom model deployment, and mission orchestration. It integrates seamlessly into various applications, including drone R&D, robotics education, and scientific research competitions.
7. High Cost-Performance Ratio & High Integration
Features an integrated design that combines the flight controller and computing platform into a single unit, thereby simplifying wiring, reducing power consumption, and minimizing payload weight. This compact and lightweight solution delivers both flight control and AI inference capabilities simultaneously, offering lower costs and superior local processing power compared to similar foreign-made platforms currently on the market.
| AI Algorithms | ||
|---|---|---|
| Function | Applicable models | Application Scenarios |
|
Object Detection
|
FCOS / YOLOv5 / YOLOv7 / YOLOv8 / YOLOv10 / YOLO12 / YOLO-World / SSD / PP-YOLO | Person/Vehicle Identification, Object Counting, Power Facility Defect Detection (e.g., damaged insulators); Agricultural Crop Identification, Suspicious Person Detection, Unmanned Security Monitoring. |
|
Object Tracking
|
DeepSORT / ByteTrack |
Automatic Dynamic Target Locking (e.g., tracking individuals or vehicles); Drone Escort; Group Activity and Behavior Analysis. |
|
Image Segmentation
|
DeepLabV3 / UNet / YOLO11-Seg / YOLO8-Seg / MobileSAM | Semantic segmentation of terrain in farmlands, forested areas, and disaster zones; extraction of buildings and roads; wildfire boundary segmentation; and identification of water pollution areas. |
|
Image Classification
|
MobileNet / EfficientNet / ResNet | Pest and Disease Type Identification; Land Cover/Vegetation Classification; |
|
Pose Estimation
|
OpenPose / YOLO11-Pose | Human Pose Monitoring; Human Pose Assessment in Search and Rescue Operations; Action and Behavior Analysis |
|
Localization and Mapping
|
Cartographer / ORB-SLAM3 / SLAM-Toolbox / Navigation2 | Indoor and Forest Drone Navigation; Map Construction and Path Planning Assistance; Air-Ground Collaborative Perception Fusion |
|
OCR Text Recognition
|
PaddleOCR | Street Sign Recognition; License Plate Recognition |
|
Multi-Task Fusion Models
|
Supported Formats:
|
Practical Application Deployment Workflow:
|
What new features does the USX52 offer compared to the USX51?
1. Upgraded USB 3.0 speed to 5 Gb/s.
2. Added an audio interface to support external loudspeakers.
3. Added a Wi-Fi antenna port to facilitate short-range debugging.
4. Added a TF card slot to expand storage capacity.
Parameter
FMU Processor:STM32H753 – Arm® Cortex®-M7 480MHz, 2MB memory, 1MB SRAM
IO Processor:STM32F103 – Arm® Cortex®-M3 72MHz, 64KB SRAM
Accelerometer/Gyroscope:ICM-45686 × 3
Compass:BMM150
Barometer:BMP388 + ICP20100
Input:5V / 5A
Operating Temperature:-20 ~ 70°C
Dimensions:122 × 58 × 28mm
Weight:195g
Power Consumption:8.7W
For more information, please visit:https:wiki.utmsys.org
-62.jpg?w=960&h=1373)
-47.jpg?w=960&h=1213)


