.png?w=1000&h=1000)


-AI-20250727.png?w=1000&h=1000)
.png?w=1000&h=1000)
.png?w=1000&h=1000)
.png?w=1000&h=1000)
.png?h=1000&q=80&w=1000)

-AI-20250727.png?h=1000&q=80&w=1000)
.png?h=1000&q=80&w=1000)
.png?h=1000&q=80&w=1000)
.png?h=1000&q=80&w=1000)
✔ worldwide delivery
✔ Refund for lost or damaged packages

✔ We offer a variety of secure payment methods, including debit/credit cards, PayPal, and bank transfers.
✔ Every transaction is protected
✔ 100% Authentic, Official Warranty
✔ Returns within 15 days – quality issues only
-33.svg?w=256&h=256)
✔ 24-hour response
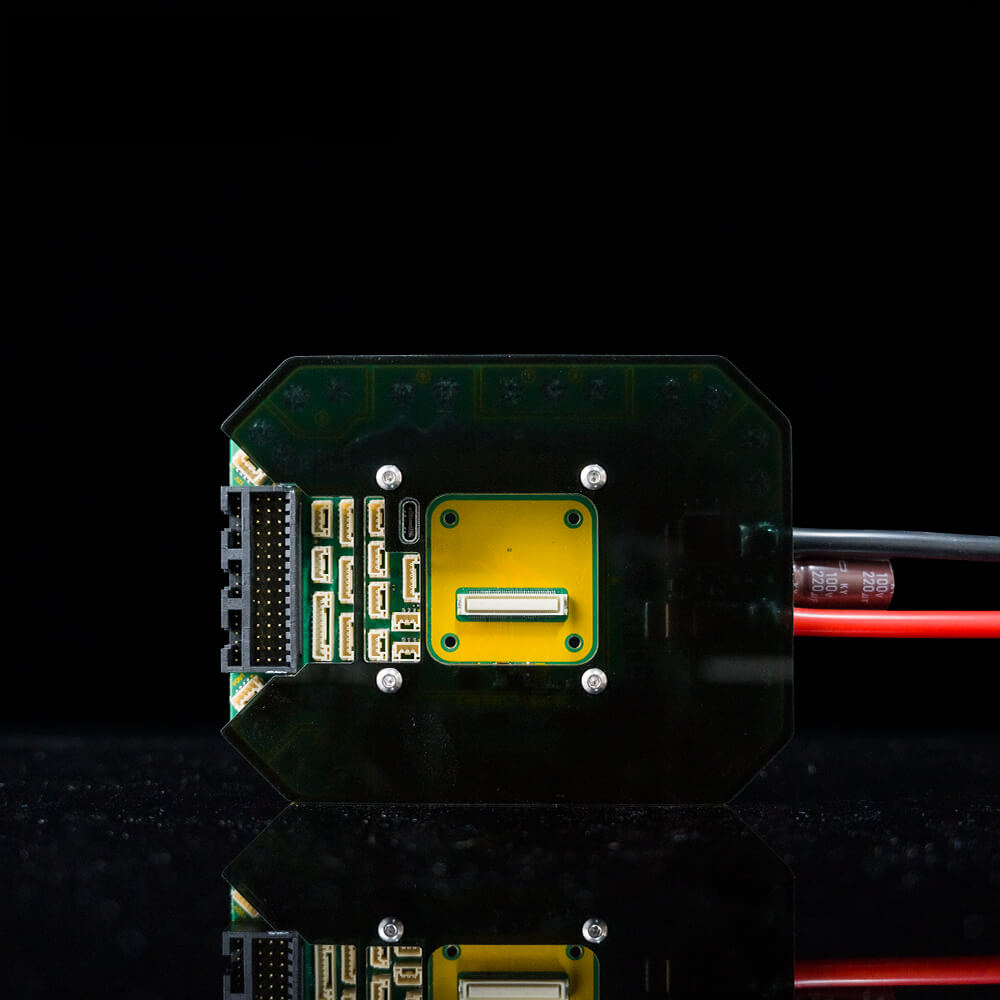
CAN PDB is a multi-functional baseboard of CORE controller, which provides abundant interfaces, integrates the functions of power module and power distribution board, and supports voltage input of 14~60V, and provide continuous working current up to 110A. It adopts self-developed ITT algorithm and has high accuracy power detection of 0.1 A and 0.05V. It has 10 power output welding points and provides a 5V/ 6A and a 12V /4A stabilized output to provide power for external device. Supports the CORE modules of V5+, X7+, and X7+ Pro Controller.
CUAV CAN PDB Features:
1–Support 14~60V voltage input, 110A current.
2–0.1A, 0.05V power measurement accuracy
3–14 PWM outputs
4–5V/6A and a 12V/4A stabilized output
5–Thickened tinned PCB to reduce internal resistance
6–Power indicator LED, visually display battery voltage status
Main Parameter |
|
| MCU | STM32F412(32 Bit Arm® Cortex®-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Operating Voltage | 14 ~ 62V(4 ~ 15S Lipo) |
| Detection Current Range | 0 ~ 110A |
| Output Power(MAX) | 6000W(last 120s) |
| Stable Output Power(MAX) | 5500W |
| Core | V5+ / X7+ / X7+ Pro CORE |
| Frame Type | Plane/VTOL/Copter/Heli/Rover/Sub |
| Controller Firmware | ArduPilot 4.0.0 and above firmware PX4 1.11.0 and above firmware |
| Operating Temperature | -20 ~ 100℃ |
Interface |
|
| V_OUT | 5V(default)/7.4V/8.2V(4A) |
| Servo VCC | 5V(default)/7.4V/8.2V(8A) |
| 12V OUT | 4A(max) |
| USB | 1 |
| UART1 | 5(GPS/UART4/TELEM1/TELEM2/DEBUG) |
| CAN | 2 |
| I2C | 3 |
| SBUS/DSM IN | 1 |
| PPM IN | 1 |
| Servo | 14 |
| ADC3.3 | 1 |
| ADC6.6 | 1 |
| SBUS Outs | 1(This interface is invalid when using X7+/X7+pro core) |
| RSSI | 3.3V(Analog input) |
| DSU7 | 1 |
| Size | 12.8cm (length) * 10.0cm (width) *1.2cm (height) |
| Weight | 200g (including cable) |
| Wire Length | 30cm |
















加载中


