



Fast shipping, worldwide delivery | Refund for lost or damaged packages

Worry-free after-sales service | Easy returns and exchanges
.svg?w=256&h=256)
Quality Assurance | Official Warranty

Security and Privacy | Every transaction is protected
-33.svg?w=256&h=256)
Professional Support | 24-hour response
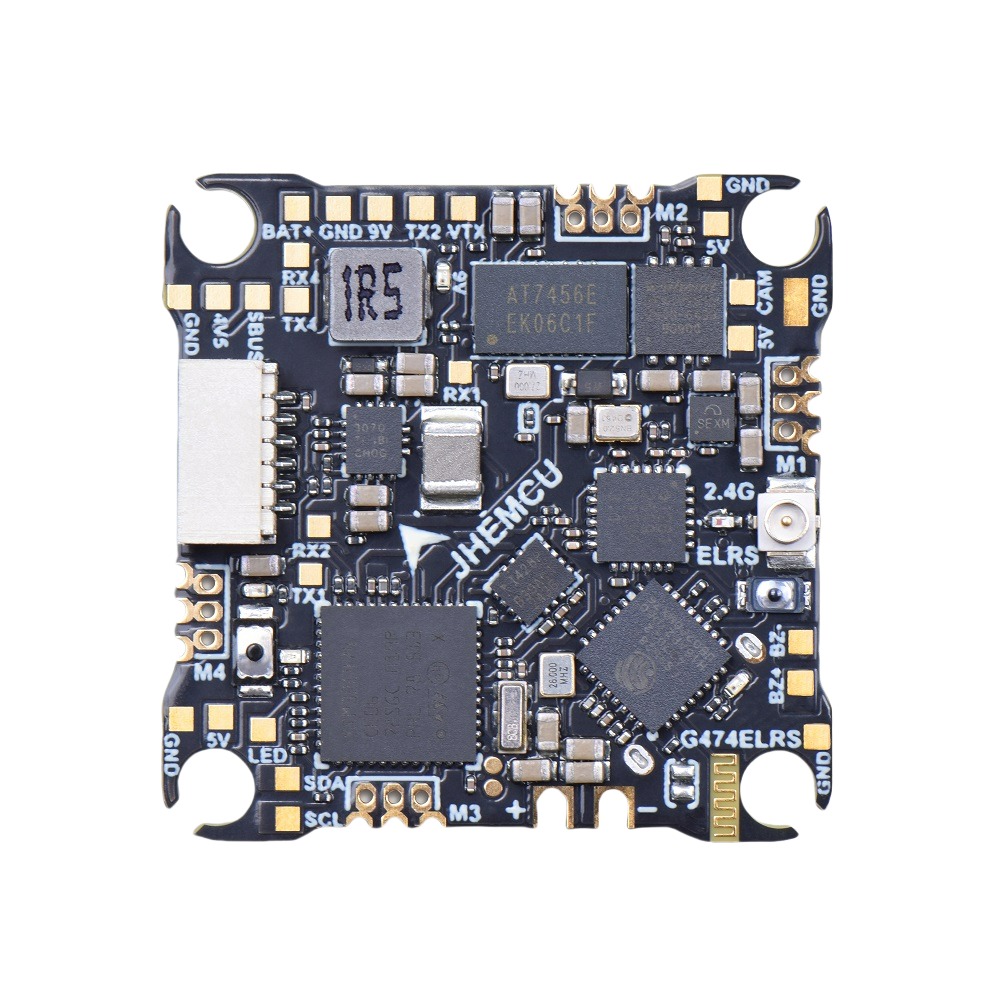
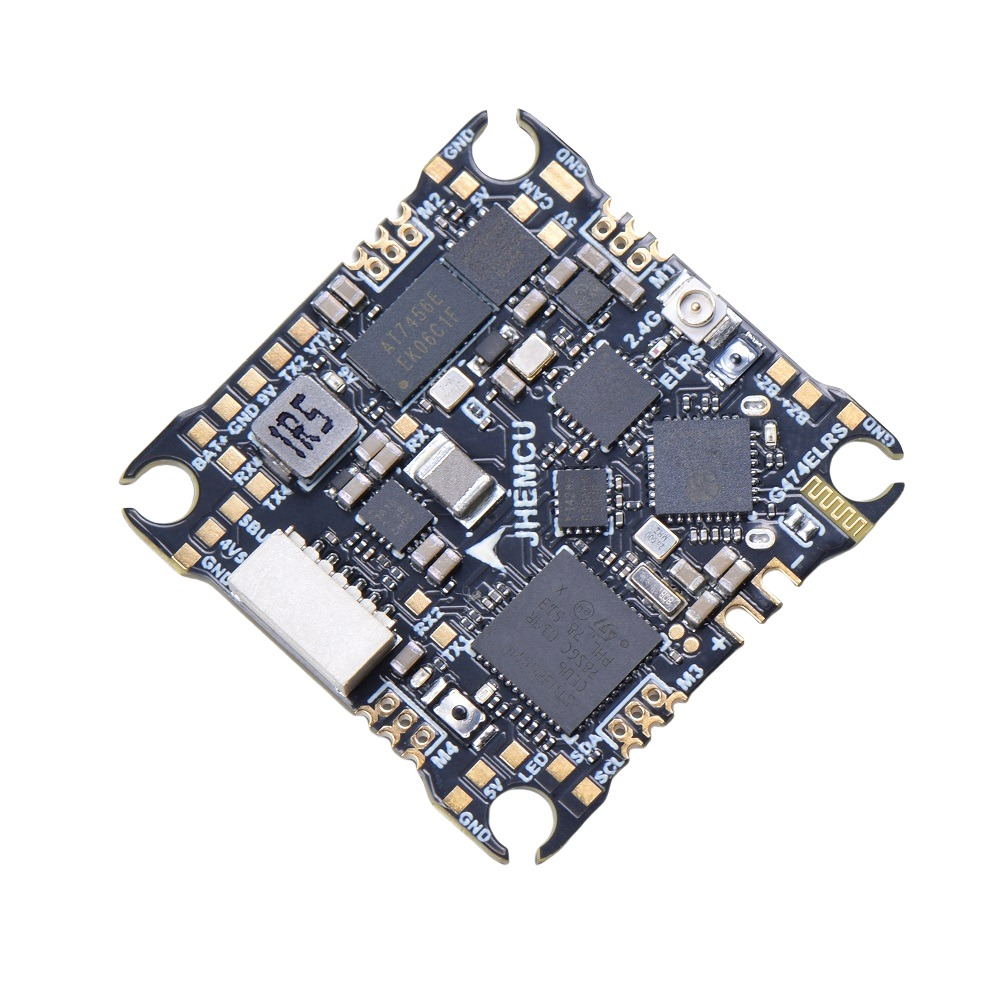
JHEMCU G474ELRS uses STM32G474 processor, frequency 170MHZ, ICM42688-P gyroscope, integrated OSD, built-in 5V/1.5A BEC buck-boost circuit, built-in 9V/2A BEC boost circuit to provide stable 9V output for the image transmission socket, no black screen when using the HD sky end in 2S, built-in independent ELRS 2.4G receiver, support 1-2S 12A brushless electric adjustment four-way. The circuit board has an 8MB black box and no barometer module. If you choose 1S power supply and encounter difficulties in starting the motor, please increase the starting power value appropriately to a startable value.
Technical Parameters:
Model: JHEMCU G474ELRS
MCU: STM32G474CE (170MHZ, 512K)
Gyroscope: ICM-42688-P
Barometer: No
OSD chip: AT7456E
Black box: 8MB
LED programming: Support
BB beep: Support
Input voltage: 1-2S
I2C interface: Support
BEC: 5V/1.5A
BEC: 9V/2A
Camera input: Support
Serial control port: Four channels, UART1, UART2, UART3, UART4
(UART1 for SBUS, UART2 for image transmission signal, UART3 for internal ELRS receiver, UART4 is reserved for GPS and other serial devices)
Flight control firmware: Betaflight 4.5.2 JHEG474.HEX
Electric speed current: 12A * 4
Ammeter: Yes
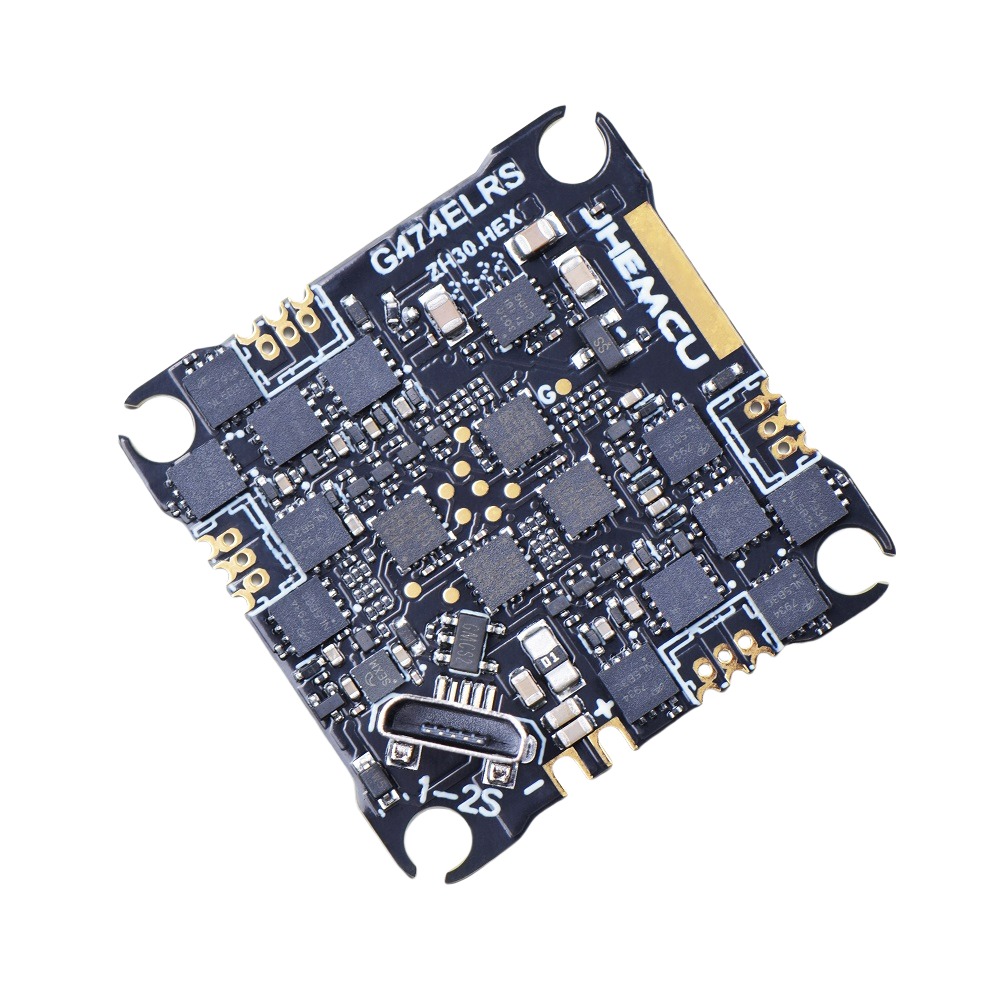
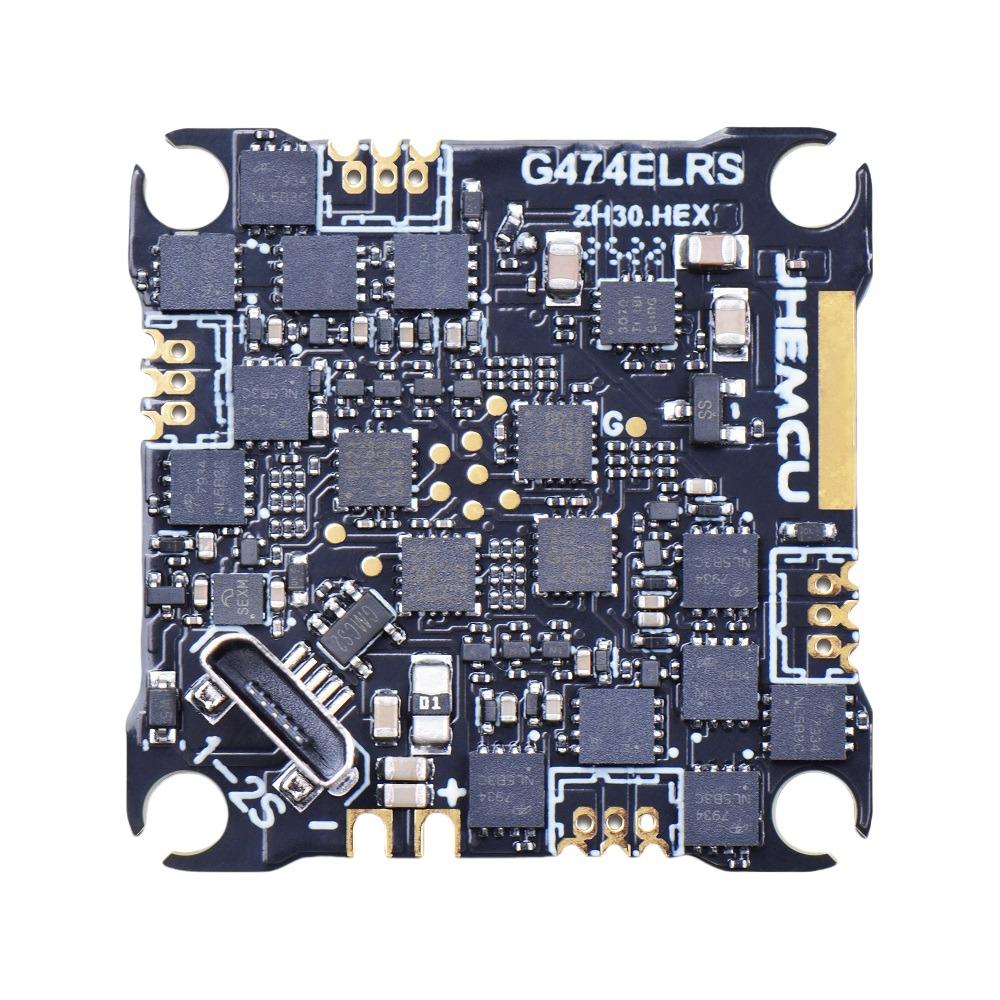
Firmware: BlueJay Z-H-30.HEX
Flight control default ESC driver protocol: DSHOT600
Receiver type: ELRS
Receiver frequency: 2.4G
Receiver signal protocol: CRSF
Does it support WIFI update of ELRS firmware: Yes
Is it an independent receiver: Yes, not SPI
Hole position and shock absorber hole position conversion: M3, 25.5*25.5MM
Maximum dimensions: 30*30MM
Weight: 4.6g






加载中


.svg?w=200&h=200)
.svg?w=256&h=256)
